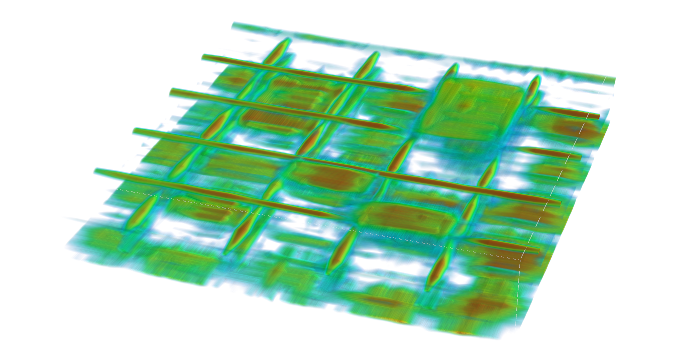
With regard to operation, the MIRA can work in either one of three modes, namely calibration mode, B-scan mode and map mode. First, the calibration mode is to change the settings of the device and data collection parameters. Second, the B-scan mode is to check the equipment performance or to quickly scan a random spot on the surface. Finally, the map mode is to scan an entire area of the test structure. Only in this mode, the MIRA will be able to generate a 3D visulization of the structure.